
Scientific journal
International Journal of Experimental Education
ISSN 2618–7159
ИФ РИНЦ = 0,827
EXPERIMENTAL UNIT FOR RESEARCH OF RIDING COMFORT OF A VEHICLE WITH CONTROLLABLE PNEUMATIC SUSPENSION

В последние годы при конструировании автотранспортных средств (АТС) всё больше внимания уделяется активной безопасности. Во всём мире отмечается тенденция роста удельной мощности двигателя, в связи с этим возрастает динамика и средняя скорость движения автомобиля. При этом повышаются требования к подвескам, которые должны обеспечивать хорошую плавность хода, управляемость и устойчивость в широком диапазоне дорожных условий. Такие требования могут выполнять управляемые системы подрессоревания, что в свою очередь влечет потребность к изучению их характеристик и режимов работы.
В Волгоградском государственном техническом университете (ВолгГТУ) на кафедре АТС ведутся исследования пневматических систем подрессоривания транспортных средств [1, 2, 3, 7]. В рамках этого исследования была разработана математическая модель управления пневматической подвеской транспортного средства. Для проверки адекватности математической модели и определения упруго-диссипативных характеристик пневматической подвески была создана экспериментальная установка (см. рис. 1).
Экспериментальная установка представляет собой 4-опорную модель транспортного средства с независимой пневматической управляемой подвесокой, установленную на рельсы синусоидального профиля, которые имитируют неровности дорожного покрытия. Подвеска состоит из рычагов передающих нагрузки от дороги через пневмоэлементы на остов установки выполняя роль демпфирующего и упругого элемента. Управление осуществляется за счет шагового клапана реализующего режимы частичного дросселирования при сообщении основной пневматической камеры с дополнительной. Роль привода клапана выполняет шаговый двигатель, который управляется микропроцессорным блоком управления (БУ).
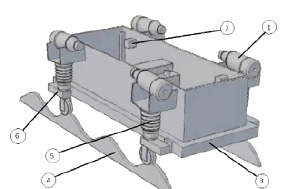
Рис. 1. Экспериментальная установка: 1 – дополнительный объём, 2 – шаговый клапан, 3 – остов, 4 – профиль дороги, 5 – основной объём, 6 – рычаги
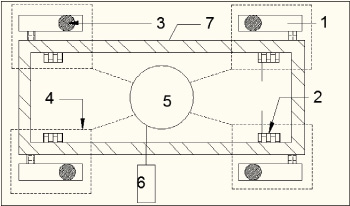
Рис. 2. Схема размещения элементов мехатроники: 1 – Рычаг подвески, 2 – шаговый клапан, 3 – гироскоп, 4 – БУ с драйвером шагового двигателя, шаговым двигателем, датчиком положения, 5 – отладочная плата с трехкомпонентным акселерометром и гироскопом, 6 – ПК
В процессе движения модели транспортного средства по синусоидальному профилю происходит деформация пневматических элементов системы подрессоривания и раскачивание остова модели. С целью определения мгновенных динамических параметров всех опор подвески и остова модели в целом БУ считывает с акселерометров и гироскопов, находящихся в центре масс остова данные об ускорениях и углах его крена и показания гироскопов, расположенных на продольных рычагах подвески. Полученные данные с БУ через отладочную плату передаются на ПК, который, в зависимости от полученных данных и управляющего алгоритма, вырабатывает управляющие сигналы для шаговых клапанов. Показания гироскопов остова и рычагов подвески дают возможность определять в любой момент времени углы их отклонения относительно горизонта, а, следовательно, и вычислять положение, перемещение и деформацию элементов подвески.
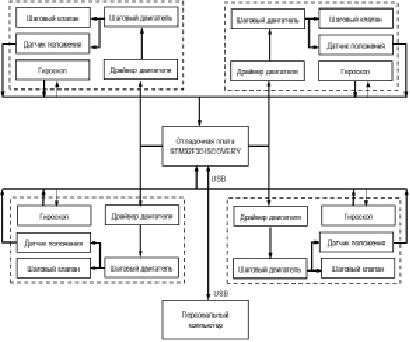
Рис. 3. Структурная схема микропроцессорной системы управления
На рис. 3 показана структурная схема распределенной системы управления, построенная на основе отладочной платы STM32F3DISCOVERY, и состоит из следующих компонентов.
Отладочная плата STM32F3DISCOVERY на 32-разрядном микроконтроллере STM32F303VCT6 с памятью на 256 КБ Flash, 48 КБ RAM, рабочей частотой до 72 МГц и встроенными на плате инерциальными датчиками: 3-осевым гироскопом L3GD20, 3D–цифровым линейным акселерометром и цифровым магнитометром LSM303DLHC, дополненных коммуникационными интерфейсами и 87 линиями портов ввода/вывода.
Четыре программно-управляемых блока контроля и регулирования жесткостью подвески. На рис. 3 они выделены пунктирными линиями. Каждый блок включает: драйвер двигателя – для формирования ШИМ сигнала управления шаговым двигателем [8] (мостовой усилитель VNH3SP30); шаговый двигатель (биполярный двигатель типа SM200-0.22-1-02), управляющий шаговым клапаном; шаговый клапан, регулирующий жесткость пневматической подвески; датчик положения, представленный потенциометром, реализующим обратную связь с микропроцессорной системой; гироскоп (МЭМС-датчик L3G4200D ST) для определения динамических параметров пневматической подвески.
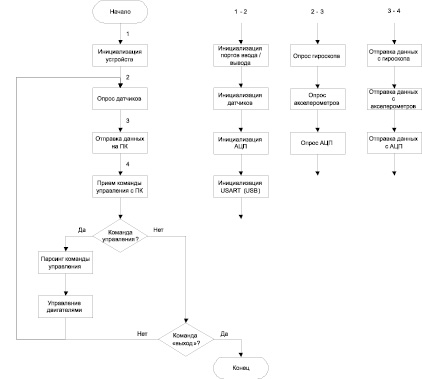
Рис. 4. Блок-схема алгоритма работы программы
Отладочная плата располагается в центре масс установки, это позволяет считывать угол отклонения всей платформы с гироскопа, расположенного на отладочной плате. БУ располагаются по углам платформы (рис. 2). Связь системы управления с персональным компьютером (ПК) осуществляется по USB-порту, через который передается и напряжение питания бортовой системы.
Работа системы начинается с инициализации всех портов для управления внешними устройствами (драйвера шаговых двигателей), датчиков, АЦП и интерфейса связи с ПК (рис. 4). После инициализации система переходит в режим постоянного опроса датчиков и АЦП и отправки собранной информации на ПК. При поступлении с ПК команды управления двигателями в системе (в отладочной плате) генерируется запрос прерывания и система переходит к разбору пришедшей команды.
Для бортовой системы определено два типа команд: команда управления двигателями и системная команда.
Команда управления двигателями представлена следующим форматом:
<Номер двигателя><Угол поворота>.
Системная команда «Выход» вызывает процедуру завершения опроса датчиков и выхода встроенного АЦП, принимающего сигналы обратной связи от датчиков положения, отправки данных на ПК и обработки ошибок.
Для отображения информации, представленной в виде команд оператора и данных от датчиков бортовой системы, при исследовании различных алгоритмов управления пневматической подвеской [4, 5, 6] разработана интерфейсная пользовательская программа (рис. 5).
Окно программы содержит информационные блоки отображения данных гироскопов всех опор подвески, об углах поворота шаговых клапанов, значениях отклонения бортового гироскопа и акселерометра (в центре окна) и блоков коммуникационной информации.
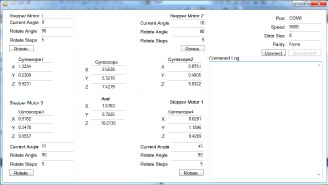
Рис. 5. Внешний вид окна программы для отображения текущего состояния системы и управления двигателями
Программа позволяет отображать информацию о состоянии каждого БУ двигателями, а именно: показания каждой оси гироскопа и текущее положение шагового клапана. Управление определенным шаговым двигателем реализуется путем установки угла поворота и нажатия соответствующей кнопки «Rotate».
Представленная экспериментальная установка позволяет разрабатывать и проверять алгоритмы управления пневматическими системами подрессоривания АТС.
Библиографическая ссылка
Шевчук В.П., Шеховцов В.В., Ляшенко M.В., Скакунов В.Н., Гугучкин Д.А., Уразов Р.Р., Лесных В.О. ЭКСПЕРИМЕНТАЛЬНАЯ УСТАНОВКА ДЛЯ ИССЛЕДОВАНИЯ ПЛАВНОСТИ ХОДА ТРАНСПОРТНОГО СРЕДСТВА С УПРАВЛЯЕМОЙ ПНЕВМАТИЧЕСКОЙ ПОДВЕСКОЙ // Международный журнал экспериментального образования. 2013. № 10-2. С. 420-424;URL: https://expeducation.ru/en/article/view?id=4263 (дата обращения: 16.07.2026).