

Для решения задачи структурного синтеза плоского двухплатформенного механизма с тремя приводами будем использовать универсальную структурную систему (1) [1]
где τ число кинематических пар наиболее сложного звена цепи, n - число звеньев, добавляющих в цепь по i кинематических пар, n - общее число звеньев, p3 - число одноподвижных кинематических пар, W -подвижность механизма.
Зададимся следующими параметрами:τ=4, W=3.
Из последнего уравнения системы (1) получим p5=(3n-3)/2, откуда следует, что система должна содержать в своем составе нечетное число звеньев. Т.к. механизм должен иметь три подвижных ветви и два уровня платформ, его нельзя строить с числом звеньев менее 10. Примем n = 11.
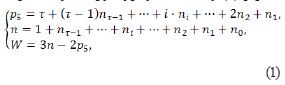
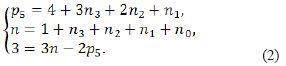
Подставив n = 11 в (2), получим n0=n2– 1, n1=11–2n2. Откуда при пяти двухпарных звеньях получим три возможных решения: 1) n2 = 1, n0 = 0, n1 = 9; 2) n2 = 2, n0=1, n1=7; 3) n2=3, n0=2, n1=5.
Все эти три решения реализуются схемами, показанными на рисунке 1.
Важно отметить, что хотя найденные решения заметно отличаются, реализуются они в одну и ту же цепь. Это легко проследить по обозначениям присоединяемых звеньев.
Список литературы
Дворников Л.Т. Начала теории структуры механизмов: Учебное пособие/ Новокузнецк, 1994 – 102 с.
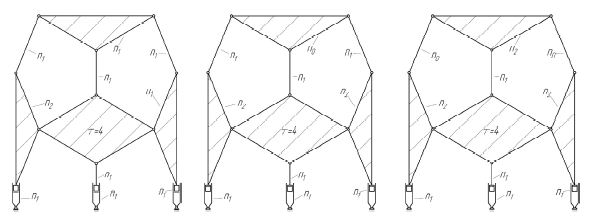
Рисунок 1 - схемы плоских двухплатформенных механизмов с тремя приводами