

В настоящее время вопросам безопасности мореплавания уделяется значительное внимании. согласно главы 8, раздела А-82, Части 3-2 международной конвенции пдмнв-78/95, вахтенный механик (оператор) во время несения вахты обязан выполнять правила, необходимые для обеспечения безопасности мореплавания и квалифицированной эксплуатации всего судового оборудования (со). на современном этапе развития информационных технологий стало возможной разработка и внедрение интеллектуальных систем (ИС) информационной управляющих решений на всех этапах функи информационно-управляющей поддержки ционирования судового оборудования, необоператоров на суда различных флотов.
В связи с высокой энергооснащенностью современных судов, оператору, для принятия управляющих решений на всех этапах функционирования судового оборудования, необходима информационная и информационно-управляющая поддержка. Такой подход современных судов, оператору, для принятия позволяет существенно увеличить: уровень
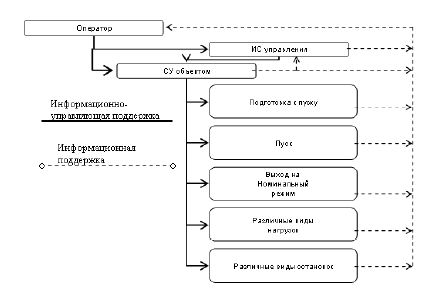
Рис 1. Структурная схема интеллектуальной поддержки судового оператора
эффективности управления, срок эксплуатации оборудования, а также снизить: риск «человеческого фактора», энергетические затраты и затраты на ремонтные и профилактические работы.
Для решения отмеченных выше задач, нами разработана структура (Рис.1) и алгоритмы реализации системы интеллектуальной поддержки судовых операторов. Обучение интеллектуальной системы, выполненной на базе нечетной логики, с использованием методов нейронных сетей, будет производиться на основе собранных, сохраненных и обработанных данных работы всего СО в различных режимах функционирования, определяемых его эксплуатационными областями (зонами):
-
нормальная (рабочая) зона;
-
предаварийная зона;
-
аварийная зона.
Качество примеров (разработанных моделей СО), на основе которых будет выполняться обучение, определяет дальнейшую работоспособность системы. Набор обучающих векторов должен быть составлен таким образом, чтобы точно описать задачу и граничные условия обучения нейросети. ИС, работая по принципу следящей системы, постоянно находит оптимальное управляющее воздействие, которое сравнивается с действиями оператора и прогнозирует дальнейшее поведение объекта управления в зависимости от задающих воздействий. Такой подход позволяет реализовать дополнительную защиту объектов управления от неверно принятых оператором решений.
В условиях, когда вахтенный персонал, по каким либо причинам не в состоянии воздействовать на объект управления, например, в предаварийном режиме (когда существует необходимость экстренного воздействия на механизм), ИС выдает оператору дальнейшую последовательность действий. Если после этого не последует управляющая реакция со стороны персонала, то ИС за минимальный промежуток времени принимает решение и берет на себя функции реализации управляющих воздействий, предотвращающих аварийные ситуации. Оптимальное, в соответствии с разработанными критериями, решение всегда определяется по принципу: «СИТУАЦИЯ -СТРАТЕГИЯ-ДЕЙСТВИЕ». В случае нехватки, неполноты или недостоверности информации по какому либо параметру, ИС, на основе имеющихся в базе знаний данных, производит подбор наиболее подходящих и будет использовать их как достоверные, что в судовых условиях крайне важно. В сравнении с традиционной программной реализацией, нейронные сети занимают небольшой объем памяти, так как сохраняется лишь структура нейронной сети и матрица весовых коэффициентов. Аппаратные реализации ИНС идеально подходят для решения задач идентификации и управления, так как обеспечивают, благодаря параллельной структуре, чрезвычайно высокую скорость выполнения операций. Основное преимущество нейронных сетей заключается в возможности избежать традиционной процедуры программирования и сбора информации (или «знаний») при помощи экспертов или конечных пользователей. Дополнительное преимущество разработанной структуры на базе нейронных сетей состоит в способности выделять общие принципы (обобщение) при предъявлении некоторого набора обучающих векторов с неполным набором данных (абстрагирование). Необходимо также отметить способность ИНС получать желаемый выход в случае неполного или нечеткого набора данных, что приводит к ошибочным результатам в случае использования традиционных компьютерных алгоритмов и программ. В работе была разработана имитационная модель, позволяющая осуществлять обучение курсантов и операторов несению вахты в центральном посту управления машинной установкой судна.