

В настоящее время на отечественных машиностроительных предприятиях испытания дизелей, проводимые по международному стандарту 1585, выполняются в стационарных режимах [2]. Однако, в условиях эксплуатации наиболее распространён неустановившийся режим нагрузки. Испытания в статических режимах, которые получили наибольшее распространение, не совсем адекватно показывают работу двигателя при реальных нагрузках.
Разработка технологического процесса испытаний при исследовании дизелей в динамических режимах позволит получить характеристики их рабочих процессов при неустановившихся нагрузках. Применение имитационных моделей позволит проводить эти испытания с наименьшими затратами ресурсов, позволяя находить наиболее оптимальные эксплуатационные параметры [3].
С целью обеспечения возможности учета динамических свойств дизеля, при проведении имитационных испытаний, применяется математическая модель двигателя, адекватность которой доказана для дизеля КАМАЗ 740.60 при стендовых испытаниях на заводе двигателей ОАО «КАМАЗ» экспериментально [1]:
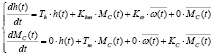 , (1)
, (1)
 , (2)
, (2)
где  и
и  – входные параметры требуемой частоты вращения вала двигателя и нагрузки, соответственно; h(t) и MC(t) – переменные, определяющие положение рейки ТНВД и нагрузку, соответственно; ω(t) – выходной сигнал, показывающий частоту вращения вала двигателя; для двигателя КАМАЗ 740.60: Th = – 3,33; Tm = 0,93; Kω = 0,008; Kh = 120; Km = 0,68; Kc = – 1,32; Khm = – 0,005.
– входные параметры требуемой частоты вращения вала двигателя и нагрузки, соответственно; h(t) и MC(t) – переменные, определяющие положение рейки ТНВД и нагрузку, соответственно; ω(t) – выходной сигнал, показывающий частоту вращения вала двигателя; для двигателя КАМАЗ 740.60: Th = – 3,33; Tm = 0,93; Kω = 0,008; Kh = 120; Km = 0,68; Kc = – 1,32; Khm = – 0,005.
Векторная передаточная функция, полученная из модели (1,2), была использована для имитационного моделирования режимов испытаний с помощью Xcos – графического редактора для разработки гибридных моделей динамических систем, входящего в пакет прикладных математических программ SciLab.
Созданы модели работы дизеля в режимах пилообразного и ступенчатого изменений нагрузки. Пилообразная нагрузка возникает при работе машинного агрегата, как грейдер, например, при установке навесного ножа или отвала бокового на автомобиль КАМАЗ, а ступенчатая нагрузка возникает при работе машинного агрегата, как передвижная буровая установка.
Ступенчатую нагрузку представим в виде ряда Фурье (3):




 . (3)
. (3)
Подставив формулу (3) в формулу (1) получим реакцию системы на эту нагрузку.
Пилообразную нагрузку, аналогично представленной (3), запишем в виде формулы (4):

 , (4)
, (4)
Подставив формулу (4) в формулу (1) получим реакцию системы на эту нагрузку.
Полученные сигналы управляющих воздействий, имитирующих работу дизеля при пилообразном и ступенчатом изменении нагрузки, можно также использовать для управления двигателем в процессе стендовых испытаний.
На основе, полученных моделей, можно создать компенсирующее воздействие, то есть модель управления рейкой топливного насоса, чтобы нивелировать колебание частоты вращения вала двигателя.
Таким образом, неблагоприятные режимы работы дизеля, которые могут привести его к преждевременному износу, возможно устранить с помощью специальных управляющих воздействий, полученных в результате имитационных испытаний.
Применение стендовых испытаний для получения параметров имитационной модели и дальнейшее имитационное моделирование режимов работы дизеля в динамических режимах позволяют при наименьших расходах ресурсов получать характеристики двигателей. Проведенные исследования с помощью имитационной модели дизеля КАМАЗ 740.60 показали возможность совершенствования его режимов работы с помощью системы управления.