

Развитие современных нанотехнологий во многом диктуется возможностями сканирующих технологий, позволяющих изучать наноструктуры на субатомном уровне с использованием туннельного эффекта. Для технологического обеспечения данного процесса используются пьезоактюаторы, собранные в общем случае из поочередно спеченных тонких металлических пленок и пьезоколец. Последние, благодаря обратному продольному пьезоэффекту, позволяют добиться точного позиционирования зонда в сканирующей зондовой микроскопии.
Проектирование пьезоактюаторов возможно с использованием достаточно точного математического аппарата. В первом приближении необходимо вычисление абсолютного удлинения отдельного пьезоэлемента. Взаимосвязь пьезоэлектрических и механических свойств материала [1] позволяет получить выражение для абсолютного удлинения:
где ε – диэлектрическая проницаемость пьезокерамики, ε0 – электрическая постоянная, E3 – напряженность электрического поля вдоль направления деформации пьезоактюатора, l – длина элемента пьезоактюатора, d33 – пьезомодуль для продольного пьезоэффекта, Yz – модуль Юнга для пьезокерамики вдоль направления деформации пьзоактюатора, U = E3l – напряжение между металлическими пластинами.
При подаче одинакового напряжения на одинаковые элементы пьезоактюатора, достаточно для вычисления абсолютного удлинения всей конструкции умножить найденное абсолютное удлинение одного элемента на количество элементов в конструкции.
Во втором приближении значения относительной продольной и поперечной деформаций можно определить по обобщенному закону Гука:
где εя, εr – относительные продольные и поперечные деформации, σ – напряжения, возникающие в материале, Yz и Yr – модули Юнга для пьезоматериала по высоте и по радиусу цилиндра, составленного из пьезоколец, соответственно, а μz и μr – коэффициенты Пуассона для пьезоматериала. К сожалению, на сегодняшний день механическим свойствам пьезокерамики уделяется меньше внимания, чем пьезоэлектрическим, следовательно, найти точные значения как модулей Юнга, так и коэффициентов Пуассона для различных пьезокерамик крайне сложно.
В общем случае необходимо учитывать анизотропную природу пьезокерамики и использовать для непосредственного расчета систему алгебраических уравнений.
где σ – продольные напряжения, возникающие в материале, τ – касательные напряжения, возникающие в материале, a – упругие константы, зависящие от свойств материала. Данные расчеты можно реализовать с помощью машинных методов, в частности, модифицировать уже существующий метод конечных элементов.
Для расширения функционала пьезоактюаторов, при проектировании устройств туннельной микроскопии, необходимо увеличивать число степеней подвижности до трех и более. Примером подобного устройства может послужить следующий трехкоординатный пьезоактюатор [2].
а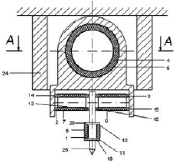 б
б 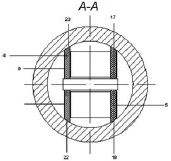
Виды трехкоординатного пьезоактюатора в разрезе сбоку (а) и сверху (б)
Трехкоординатный пьезоактюатор (рисунок а, б) содержит набор пьезотрубок 1, 2, 3, 4, 5 с электродами 6, 7, 8, 9, 10 и параллельными торцами 11, 12, 13, 14, 15,16, 17, 18, причем пьезотрубки связаны между собой посредством соединительных элементов 19, 20, 21, 22, 23, последний из которых связан с неподвижным основанием 24, а первый с зондом 25.
Трехкоординатный пьезоактюатор работает следующим образом.
При подаче напряжения на электрод 6, происходит механическая деформация пьезотрубки 1, вызванная явлением обратного пьезоэффекта. При этом зонд перемещается вдоль оси Z. При подаче напряжения на электроды 7, 8, происходит механическая деформация пьезотрубок 2, 3. При этом зонд перемещается вдоль оси X. При подаче напряжения на электроды 9, 10, происходит механическая деформация пьезотрубок 4, 5. При этом зонд перемещается вдоль оси Y.
Введение в устройство пьезоактюатора пьезотрубок, оси которых находятся в перпендикулярных плоскостях и скрещиваются, позволяет создать устройство, имеющее три степени свободы.
Следует также отметить, что использование вышеупомянутых многослойных пьезоактюаторов (в отличие от обыкновенных, отдельных пьезотрубок), позволяет увеличить диапазон получаемых перемещений при меньших напряжениях, но в то же время такая конструкция имеет некоторые недостатки, например, высокую электрическую емкость, обусловленную соединением большого количества конденсаторов из слоев керамики (диэлектрик) и металлических пластин (обкладки конденсатора). По этой причине пакетные пьезоактюаторы обладают меньшим быстродействием. Для увеличения быстродействия необходимо уменьшить амплитуду управляющего сигнала, уменьшить деформирующие усилия.
На сегодняшний день существует множество пьезокерамик, выпускаемых и отечественными, и зарубежными производителями. Для примера приведем таблицу, в которой указаны отечественные пьезоматериалы и их свойства [3].
Таким образом, современный технический опыт и научные результаты могут существенно ускорить и облегчить внедрение пьезоактюаторов в нанотехнологии. Впоследствии это может обеспечить упрощение исследований на молекулярном уровне, совершить новый технологический прорыв в этой области.
Библиографическая ссылка
Ивашов Е.Н., Федотов К.Д. ОСОБЕННОСТИ ПРОЕКТИРОВАНИЯ МНОГОКООРДИНАТНЫХ ПЬЕЗОАКТЮАТОРОВ // Международный журнал экспериментального образования. 2013. № 10-2. С. 346-348;URL: https://expeducation.ru/ru/article/view?id=4244 (дата обращения: 18.06.2026).