

Разработаны алгоритмы для адаптивного управления станцией смешения товарных бензинов на базе программируемого многопроцессорного контроллера (ПМК) «Интеграл-4АС».
Алгоритмы обеспечивают автоматический режим слежения за максимальной производительностью станции смешения товарных бензинов. Проводят идентификацию октановых чисел смешиваемых компонент и рассчитывают оптимальную рецептуру смешения товарных бензинов.
Алгоритмы разработаны для автоматизированной системы адаптивного управления станцией смешения товарных бензинов реализованной на базе программируемого многопроцессорного контроллера (ПМК) «Интеграл-4АС» [2] (рис. 1).
ПМК содержит процессор-арбитр и n-канальных взаимозаменяемых процессоров, объединенных между собой «общей магистралью» реализованной с помощью последовательных портов типа SPI, которые входят в состав архитектуры микропроцессоров AVR AT90S8515. Применение данных контроллеров позволило убрать из схемы буферную память и упростить процедуру обмена данными между процессором-арбитром и канальными процессорами. Инициатором обмена могут быть процессор-арбитр, так и любой канальный процессор.

Рис. 1. Многопроцессорный программируемый контроллер «Интеграл-4АС
Процессор-арбитр под управлением программы контролирует работу канальных процессоров, выполняет адаптивную подстройку коэффициентов соотношения смешиваемых компонентов, управляет насосами и запорной арматурой. На панели индикации индицируются суммарный расход i-го компонента, процент набранной дозы, интегральная ошибка.
Канальный процессор регулирует по ПИД-закону расход компонента согласно заданному соотношению в товарном продукте; контролирует дозу расхода данного компонента, по обратной связи (через импульсный расходомер) считывает и преобразует частотный сигнал производительности канала в цифровой код для расчета управляющего воздействия на клапан, который управляет производительностью потока i-го компонента. Тестирует самого себя, выдавая процессору-арбитру через общую магистраль код «я живой».
Основные функциональные алгоритмы системы представлены на рис. 2–3.
До смешения при включении программируемого контроллера начинают работать алгоритмы инициализации и настройки контроллера, подготовляется оперативная память для ввода информации с клавиатуры пульта управления.
С пульта управления вводятся:
– номера рабочих каналов;
– процентное содержание компонентов по каждому каналу;
– заданная производительность;
– количество приготовляемого продукта.
Во время смешения в каждом цикле программы процессор-арбитр выполняет следующее:
– тестирует ОЗУ и ППЗУ процессора;
– анализирует работоспособность канальных процессоров;
– контролирует работу насосов и состояние запорной арматуры и выполняет действия, характеризующие текущее состояние системы;
– опрашивает каналы и принимает данные о мгновенном и интегральном расходе компонентов и приготовленного продукта, а также о мгновенной и интегральной ошибке;
– определяет превышение модуля мгновенной ошибки над допустимым значением ошибки и производит адаптивную подстройку производительности системы;
– по результатам подстройки рассчитывают новую величину производительности каждого канала;
– подсчитывает количество приготовленного продукта и выдает команду каналам на замену режима, если программа выполнена;
– анализирует наличие требования на ввод информации с интеллектуального датчика октанового числа и при наличии такого, вводит информацию и производит адаптивную подстройку коэффициентов соотношения компонентов по качеству товарного продукта.
Запуск в заботу ПМК осуществляется нажатием клавиши «Пуск», а останов по требованию оператора – клавишей «Стоп». Канальные процессоры содержат основные программные блоки, представленные на рис. 3, под их управлением выполняются: инициализация программируемых аппаратных средств; тестирование ОЗУ, ППЗУ и передача арбитру кода «Я живой»; ввод коэффициентов соотношения и производительности системы; прием заданной величины производительности канала; считывание информации с частотомера и расчет величины фактической производительности; расчет мгновенной ошибки канала; расчет управляющего воздействия на регулирующий клапан по ПИД-закону; выдача управляющего воздействия на ЦАП; считывание с аппаратного счетчика суммарного расхода компонента; расчет расхода компонента (% к заданному); связь с арбитром для передачи суммарного расхода компонентов; адаптация системы по производительности трубопроводов; обработка прерывания от частотомера датчика обратной связи; программный блок «выход на режим»; программный блок «выход с режима».
Алгоритм регулирования производительности каналов соответствует ПИД-регулированию [4, 5].
Алгоритм формирует сигнал рассогласования и осуществляет ПИД преобразования этого сигнала. Сигнал рассогласования формируется как разность между величиной задания и величиной сигнала обратной связи:
E = Uзад – Uо.с.
ПИД-преобразование выполняется в соответствии с передаточной функцией

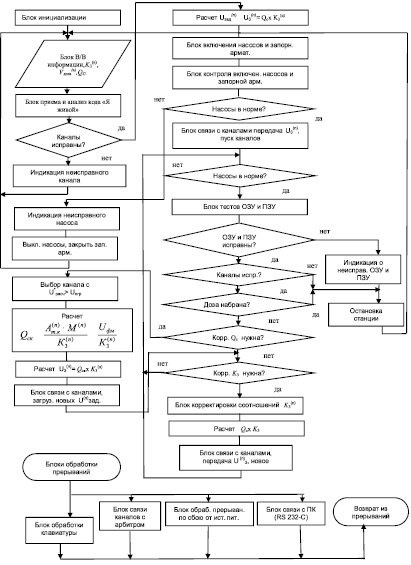
Рис. 2. Блок схема алгоритма процессора-арбитра
Адаптивная автоподстройка коэффициентов осуществляется по линейному закону в соответствии с формулой

где Kап и K – соответственно текущее и установленное (исходное) значение коэффициента (коэффициента пропорциональности, коэффициента усиления или постоянной времени интегрирования); Xап, % – сигнал автоподстройки; Kм – масштабный коэффициент, определяющий степень автоподстройки.
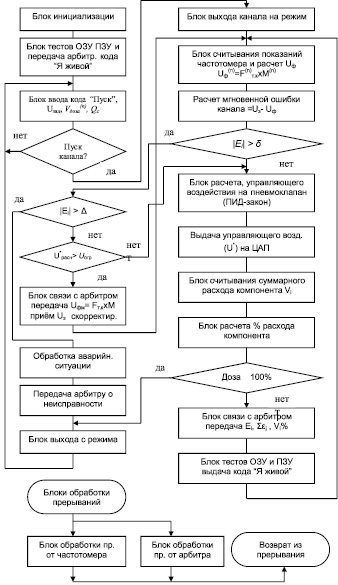
Рис. 3. Блок схема алгоритма канального процессора
При Kм = 0 автоподстройка отсутствует, при Kм < 0 увеличению сигнала Xап соответствует уменьшение параметра K. Сигнал автоподстройки Xап может быть дискретным. В этом случае логическому нулю на входе автоподстройки соответствует коэффициент Kап = K, а логической единице – коэффициент Kап = К(1 + 7,7Kм).
Максимальный диапазон увеличения параметра К относительно исходного значения составляет

Если в процессе автоподстройки параметр K достигает своего максимального значения, он ограничивается этим значением. Если подстраивается постоянная времени, то устанавливается Т = ∞.
Если в процессе автоподстройки параметр K становится равным нулю, он таким и остается (т.е. знак параметра в процессе автоподстройки не изменяется).
Время цикла программы ПИД-алгоритма Т0 состоит из времени обслуживания непосредственно ПИД-алгоритма Т0 и времени самодиагностики Тсд:
Т0 = Тсд + Тсд. (1)
Производительность трубопроводов под влиянием различных факторов может изменяться, но и тогда система должна иметь максимально допустимую для данных условий производительность.
Автоматический режим адаптации производительности системы смешения контроллер осуществляет по алгоритму, предложенному автором [1], реализующему уравнение
 (2)
(2)
где  – частота датчика производительности (расхода) n-го канала; M(n) – коэффициент масштабирования датчика расхода, выбранный таким образом, чтобы цены импульсов были равны цене заданной производительности канала; Qc – общая производительность системы; Kз – коэффициент задания канала, пропорпиональный объему n-го компонента.
– частота датчика производительности (расхода) n-го канала; M(n) – коэффициент масштабирования датчика расхода, выбранный таким образом, чтобы цены импульсов были равны цене заданной производительности канала; Qc – общая производительность системы; Kз – коэффициент задания канала, пропорпиональный объему n-го компонента.
При изменении пропускной способности в линиях трубопровода величина рассогласования εi задающего воздействия с фактической производительностью n-го канала может превысить допустимую. Тогда процессор-арбитр определяет канал, имеющий наибольшее управляющее воздействие  , и из (2) определяет общую производительность системы:
, и из (2) определяет общую производительность системы:
 (3)
(3)
При этом, если U* > U, то производительность системы уменьшается, если U* < U, то производительность системы увеличивается, в том и другом случае производительность будет максимальной для данной ситуации.
Благодаря цифровой структуре задатчика, датчика обратной связи (счетчика расхода) и использованию числовых методов вычисления управляющих воздействий по закону ПИД-регулирования суммарная ошибка сведена к минимальной «инструментальной» погрешности [2].
Схема адаптивной системы компаундирования товарных бензинов с модулем идентификации [4] представлена на рис. 4.
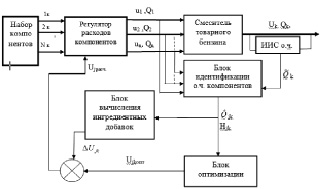
Рис. 4. Информационно-измерительная и управляющая система для адаптивной оптимизации процесса компаундирования товарных бензинов: где Uк – объем продукта; Uj – объем j-го компонента; Qк – октановое число продукта, (Yк);  – показания О.Ч. на анализаторе (ИИС) октанового числа;
– показания О.Ч. на анализаторе (ИИС) октанового числа;  – октановое число j-го компонента;
– октановое число j-го компонента;  – индентифицированное О.Ч. j-го компонента; Hj – симметрическая положительно определенная матрица; Ujопр – оптимальный расход j-го компонента; ΔUj (ΔZj) – изучающая добавка (поправка); ujрасч – расчетный расход j-го компонента; k – дискретное время
– индентифицированное О.Ч. j-го компонента; Hj – симметрическая положительно определенная матрица; Ujопр – оптимальный расход j-го компонента; ΔUj (ΔZj) – изучающая добавка (поправка); ujрасч – расчетный расход j-го компонента; k – дискретное время
Исходной информацией для работы алгоритма идентификации (АИ) является математическая модель технологического процесса смешивания бензиновых фракций, которая описывается векторным уравнением модели процесса [3].
Описание алгоритма идентификации приведено в [3].
После выполнения идентификации октановых чисел смешиваемых компонент выполняется алгоритм, в котором производится расчет оптимальных значений расходов компонент с использованием полученных оценок октановых чисел.
Таким образом, на выходе станции смешения товарных бензинов всегда будет выходить бензин нужного качества, независимо от внешних, возмущающих технологический процесс, факторов.
Библиографическая ссылка
Астапов В.Н., Житков В.А. РАЗРАБОТКА АЛГОРИТМОВ АДАПТИВНОГО УПРАВЛЕНИЯ СТАНЦИЕЙ СМЕШЕНИЯ ТОВАРНЫХ БЕНЗИНОВ // Международный журнал экспериментального образования. 2016. № 12-1. С. 42-47;URL: https://expeducation.ru/ru/article/view?id=10759 (дата обращения: 31.05.2026).